TransAID
15104
Van 2017 tot 2021
TransAID onderzocht de effecten van geautomatiseerde voertuigen op verkeersveiligheid en -efficiëntie, met een focus op Transition Areas waar geautomatiseerde systemen niet optimaal functioneren. TML modelleerde rijgedrag, analyseerde de impact van beheersstrategieën op congestie en emissies en coördineerde de verspreiding van projectresultaten.
Benieuwd naar de bevindingen van dit project? De presentaties en video's van de eindconferentie staan online op de website van TransAID.
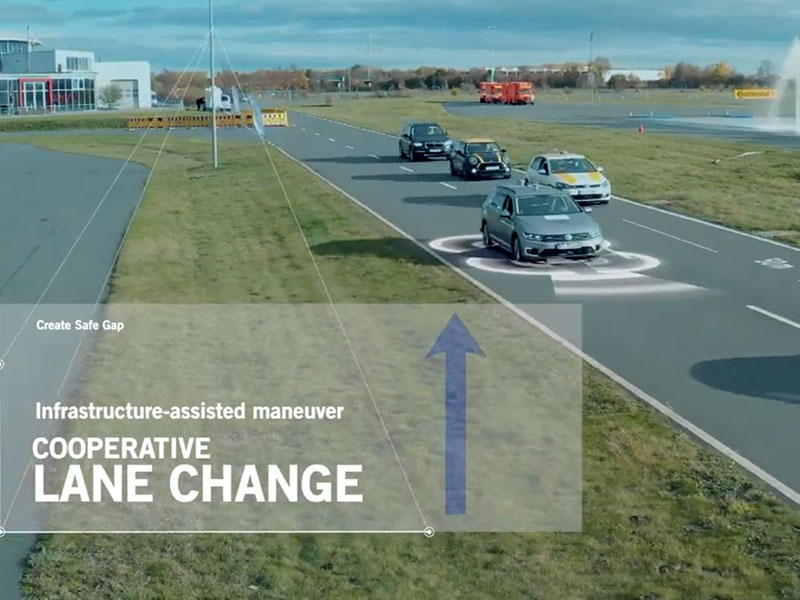
Met TransAID onderzochten we de effecten van geautomatiseerde voertuigen op verkeersveiligheid en -efficiëntie. Bij de introductie van geautomatiseerde voertuigen in het verkeer zullen er op de weg bepaalde zones en situaties ontstaan waarbij geautomatiseerde voertuigen volledig automatisch kunnen functioneren, en andere waarbij dat niet mogelijk is. We analyseerden vooral die zogenaamde Transition Areas - situaties waarin de nieuwe geautomatiseerde wagensystemen niet werken. Dat kan veroorzaakt worden door systeembeperkingen, ontbrekende wegmarkeringen, storingen aan de sensoren, complexe kruispunten of bouwwerven. In Transition Areas zullen geautomatiseerde voertuigen hun niveau van automatisatie moeten aanpassen en mogelijk zelfs de controle terug aan de bestuurder overdragen.
Met TransAID modelleerden we het gedrag van zowel bestuurders als voertuigen en realistische voertuig-tot-voertuig- en voertuig-tot-infrastructuurcommunicaties bij beperkte bandbreedte. Daarnaast formuleerden we advies voor voertuigen, waarbij we gebruikmaakten van metingen van verkeersstromen, gesimuleerde veiligheidsmaatregelen om verkeersveiligheid te beoordelen en vooropgestelde beleidsdoelstellingen. Dit systeem werd in zijn geheel ingeladen in een grote geïntegreerde simulator, waarna de meest veelbelovende oplossingen werden geïmplementeerd onder de vorm van echte prototypes, die dan gedemonstreerd werden bij realistische stedelijke omstandigheden. Op basis daarvan formuleerden we richtlijnen voor het rijden onder dit soort omstandigheden. Deze richtlijnen bevatten ook een gids met de acties en de ingrepen aan de infrastructuur die de komende 15 jaar nodig zijn opdat conventionele, geconnecteerde en geautomatiseerde voertuigen zich vlot samen door het verkeer kunnen bewegen.
TML focuste zich op de dynamische modellering van rijgedrag in relatie tot geautomatiseerde voertuigen en verschillende niveaus van autonomie. Daarnaast voerden we een impactanalyse uit van verschillende beheerstrategieën m.b.t. congestieniveaus, emissies en verkeersveiligheid (externe kosten). TML coördineerde ook alle disseminatie van het project.
Benieuwd naar de bevindingen van dit project? De presentaties en video's van de eindconferentie staan online op de website van TransAID.
Met TransAID onderzochten we de effecten van geautomatiseerde voertuigen op verkeersveiligheid en -efficiëntie. Bij de introductie van geautomatiseerde voertuigen in het verkeer zullen er op de weg bepaalde zones en situaties ontstaan waarbij geautomatiseerde voertuigen volledig automatisch kunnen functioneren, en andere waarbij dat niet mogelijk is. We analyseerden vooral die zogenaamde Transition Areas - situaties waarin de nieuwe geautomatiseerde wagensystemen niet werken. Dat kan veroorzaakt worden door systeembeperkingen, ontbrekende wegmarkeringen, storingen aan de sensoren, complexe kruispunten of bouwwerven. In Transition Areas zullen geautomatiseerde voertuigen hun niveau van automatisatie moeten aanpassen en mogelijk zelfs de controle terug aan de bestuurder overdragen.
Met TransAID modelleerden we het gedrag van zowel bestuurders als voertuigen en realistische voertuig-tot-voertuig- en voertuig-tot-infrastructuurcommunicaties bij beperkte bandbreedte. Daarnaast formuleerden we advies voor voertuigen, waarbij we gebruikmaakten van metingen van verkeersstromen, gesimuleerde veiligheidsmaatregelen om verkeersveiligheid te beoordelen en vooropgestelde beleidsdoelstellingen. Dit systeem werd in zijn geheel ingeladen in een grote geïntegreerde simulator, waarna de meest veelbelovende oplossingen werden geïmplementeerd onder de vorm van echte prototypes, die dan gedemonstreerd werden bij realistische stedelijke omstandigheden. Op basis daarvan formuleerden we richtlijnen voor het rijden onder dit soort omstandigheden. Deze richtlijnen bevatten ook een gids met de acties en de ingrepen aan de infrastructuur die de komende 15 jaar nodig zijn opdat conventionele, geconnecteerde en geautomatiseerde voertuigen zich vlot samen door het verkeer kunnen bewegen.
TML focuste zich op de dynamische modellering van rijgedrag in relatie tot geautomatiseerde voertuigen en verschillende niveaus van autonomie. Daarnaast voerden we een impactanalyse uit van verschillende beheerstrategieën m.b.t. congestieniveaus, emissies en verkeersveiligheid (externe kosten). TML coördineerde ook alle disseminatie van het project.
