EMDAS
12.69
Van 2015 tot 2017
In dit onderzoek naar autonome voertuigen bestudeerde TML de functionele en operationele veiligheid door een kader voor ongevalstypologieën op te zetten, gebaseerd op Belgische ongevallenstatistieken en gevalideerd met softwaresimulaties. De impact van AV's op verkeersveiligheid werd ingeschat en vergeleken met niet-autonome voertuigen.
Autonome voertuigen (AV’s) komen steeds meer voor. Er is dus een duidelijke nood aan onderzoek op het vlak van functionele en operationele veiligheid. In dit onderzoek bestudeerden we dat laatste aspect, met name de volledige context van een voertuig dat zich voortbeweegt in een omgeving met andere verkeersdeelnemers en de daaraan gerelateerde ongevalsrisico’s.
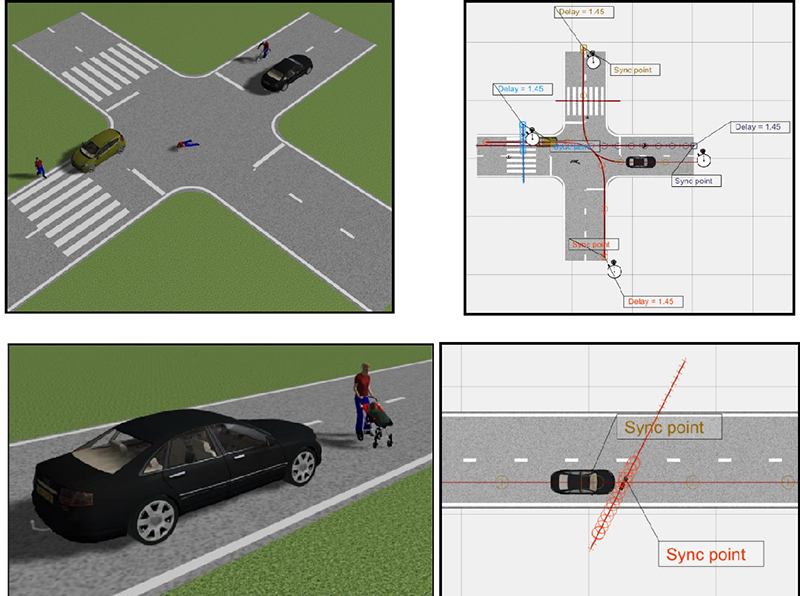
We zetten een kader op met ongevalstypologieën, gebaseerd op beschikbare ongevalsanalyses (situatieschetsen) en literatuur, aangepast aan Belgische ongevallenstatistieken. Dit werd gevalideerd door softwaresimulaties, waarbij bepaalde scenario’s gedefinieerd werden waarvoor we verschillende experimentele condities vastlegden. Deze resultaten werden dan vertaald naar plaatsvervangende veiligheidsmaatregelen, die op hun beurt werden omgezet in berekende risico’s op ongevallen en daarmee samenhangend risico’s op verwondingen. Dit liet ons toe om de impact van autonome voertuigen op verkeersveiligheid te kunnen inschatten en een vergelijking te maken met niet-autonome voertuigen (of voertuigen met een lager niveau van autonomie).
Autonome voertuigen (AV’s) komen steeds meer voor. Er is dus een duidelijke nood aan onderzoek op het vlak van functionele en operationele veiligheid. In dit onderzoek bestudeerden we dat laatste aspect, met name de volledige context van een voertuig dat zich voortbeweegt in een omgeving met andere verkeersdeelnemers en de daaraan gerelateerde ongevalsrisico’s.
We zetten een kader op met ongevalstypologieën, gebaseerd op beschikbare ongevalsanalyses (situatieschetsen) en literatuur, aangepast aan Belgische ongevallenstatistieken. Dit werd gevalideerd door softwaresimulaties, waarbij bepaalde scenario’s gedefinieerd werden waarvoor we verschillende experimentele condities vastlegden. Deze resultaten werden dan vertaald naar plaatsvervangende veiligheidsmaatregelen, die op hun beurt werden omgezet in berekende risico’s op ongevallen en daarmee samenhangend risico’s op verwondingen. Dit liet ons toe om de impact van autonome voertuigen op verkeersveiligheid te kunnen inschatten en een vergelijking te maken met niet-autonome voertuigen (of voertuigen met een lager niveau van autonomie).
