EMDAS
12.69
From 2015 to 2017
In this research on autonomous vehicles, TML studied functional and operational safety by setting up an accident typology framework based on Belgian accident statistics and validated with software simulations. The impact of AVs on road safety was estimated and compared with non-autonomous vehicles.
Autonomous vehicles (AVs) are becoming increasingly common. Thus, there is a clear need for research on functional and operational safety. In this research, we studied the latter aspect, in particular the full context of a vehicle moving in an environment with other road users and the related accident risks.
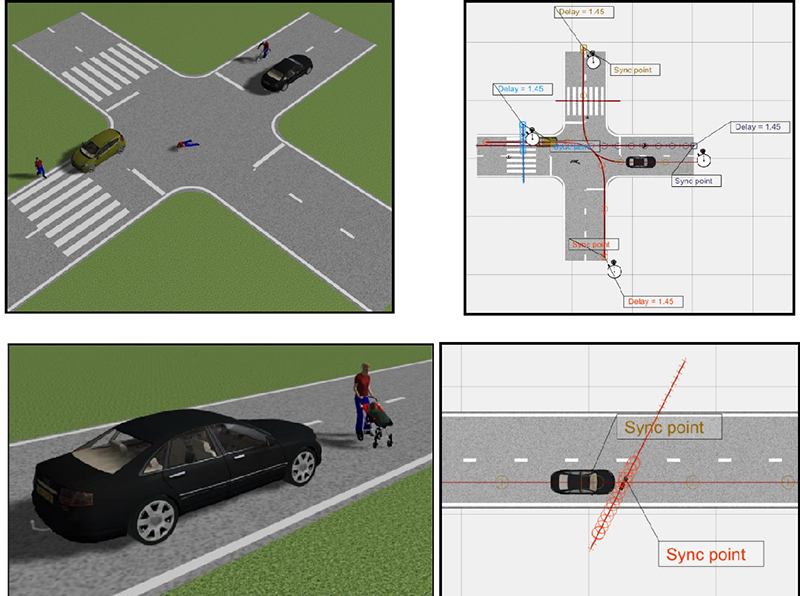
We set up a framework with accident typologies, based on available accident analyses (situation sketches) and literature, adapted to Belgian accident statistics. This was validated by software simulations, where certain scenarios were defined for which we established different experimental conditions. These results were then translated into surrogate safety measures, which in turn were converted into calculated accident risks and associated injury risks. This allowed us to estimate the impact of autonomous vehicles on road safety and make a comparison with non-autonomous vehicles (or vehicles with a lower level of autonomy).
Autonomous vehicles (AVs) are becoming increasingly common. Thus, there is a clear need for research on functional and operational safety. In this research, we studied the latter aspect, in particular the full context of a vehicle moving in an environment with other road users and the related accident risks.
We set up a framework with accident typologies, based on available accident analyses (situation sketches) and literature, adapted to Belgian accident statistics. This was validated by software simulations, where certain scenarios were defined for which we established different experimental conditions. These results were then translated into surrogate safety measures, which in turn were converted into calculated accident risks and associated injury risks. This allowed us to estimate the impact of autonomous vehicles on road safety and make a comparison with non-autonomous vehicles (or vehicles with a lower level of autonomy).
